
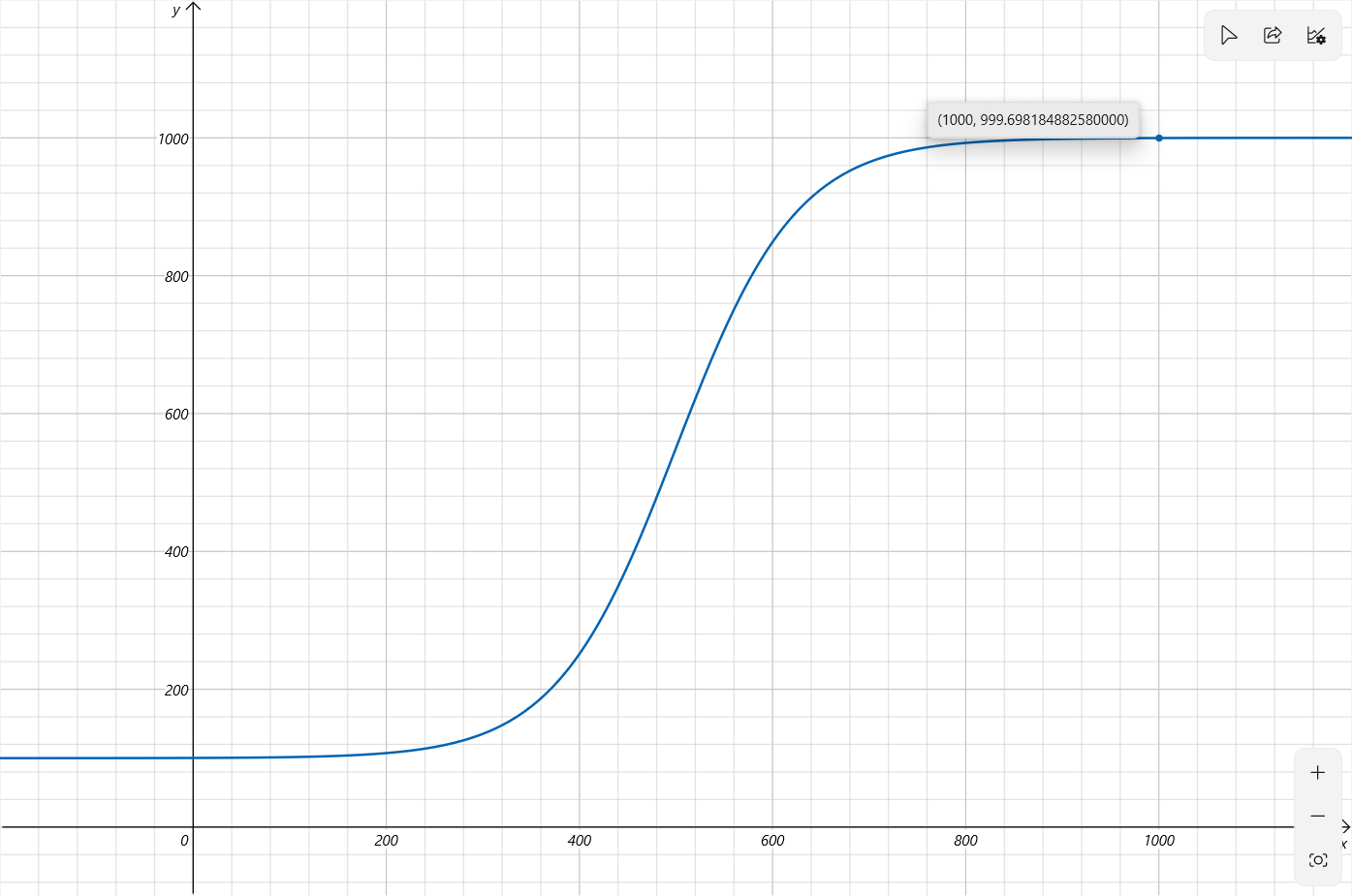
速度曲线函数为 ,由 变换而来,因为电机由PWM驱动,改变转速就是改变PWM的频率,所以函数中的 为初速度对应的PWM频率, 为末速度对应的PWM频率,而 为加速时长(单位为毫秒),即从 加速到 所花费的时间。例如,从 加速到 ,加速时长设为 ,所得频率变化曲线如下图所示:
在代码中根据这条曲线改变PWM的频率即可实现电机的平滑变速。
Loading...
速度曲线函数为 ,由 变换而来,因为电机由PWM驱动,改变转速就是改变PWM的频率,所以函数中的 为初速度对应的PWM频率, 为末速度对应的PWM频率,而 为加速时长(单位为毫秒),即从 加速到 所花费的时间。例如,从 加速到 ,加速时长设为 ,所得频率变化曲线如下图所示:
在代码中根据这条曲线改变PWM的频率即可实现电机的平滑变速。
本文链接: 一种步进电机S形变速控制算法
本文采用 CC BY-NC-SA 4.0 许可协议,转载请注明出处。